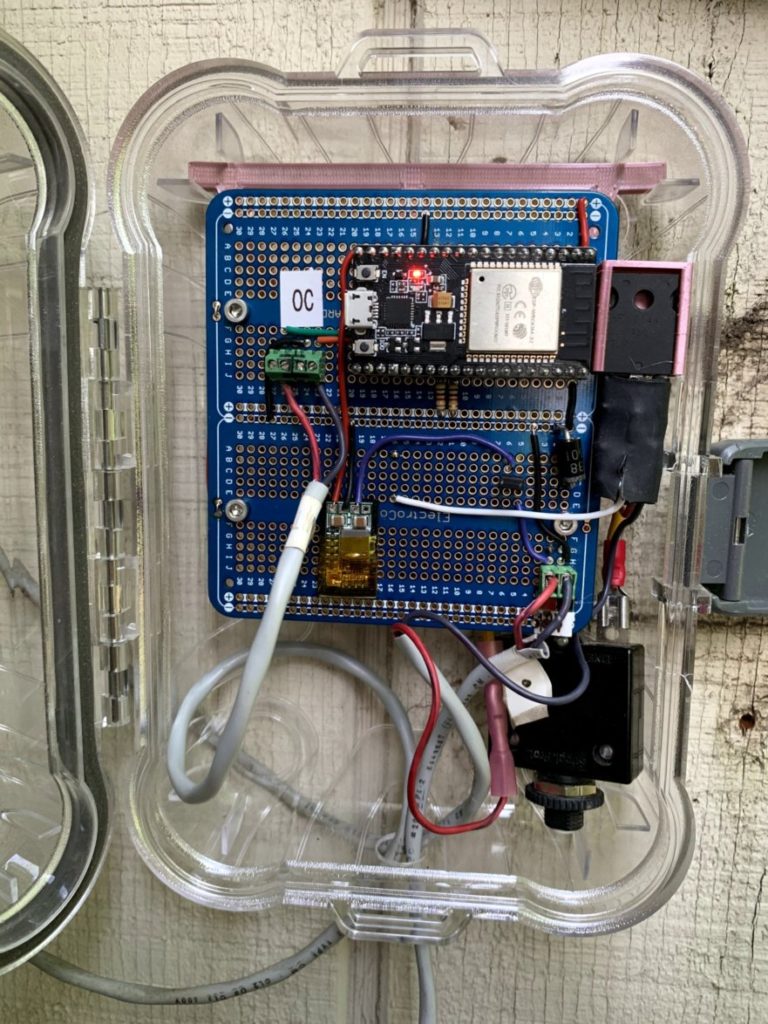
After over a decade of service my original coop controller finally died. This was no fault of it’s own the old 12V AGM battery died and when I hooked up the new one I did so with the incorrect polarity. This was rapidly followed but a “pop” and the dreaded magic smoke escaping from it. The flyback diode took the brunt of the damage it followed by the speed controller FET. Because of this I felt it in my best interest, instead of reviving the old board I would start anew with more goodness. The original controller suffered from a few problems:
- It was difficult to tell if the door was actually up or down from the house
- When it got an error (i.e. chicken poop prevented the door from closing) it was hard to reset
- It utilized a CdS sensor I pulled from a smoke detector which wasn’t temperature stable year round
- It was a custom arduino board and the chip needed to be pulled and put in a programmer to update the firmware (whch is lost to time)